Каталог
Во второй половине прошлого года Bluetooth SIG выпустила окончательную версию спецификаций Bluetooth 6.0, и скоро должны появиться устройства, поддерживающие этот новый стандарт. Обычно обновление стандарта означает кучу терминов и цифр, глядя на которые мы не видим никаких преимуществ, но в этот раз некоторые из этих нововведений обычные пользователи определенно заметят.




Большая часть этих изменений находится «под капотом» устройства и относится к вещам, с которыми пользователь не взаимодействует. Однако с ними имеют дело компании-производители устройств и разработчики программного обеспечения, которые на базе нового стандарта должны заметно улучшить такие вещи, как стабильность Bluetooth-подключений, скорость передачи данных и общее время автономной работы устройств. А одно из самых значительных нововведений под названием канальное зондирование (Bluetooth Channel Sounding) должно обеспечить устройства Bluetooth полным пространственным представлением.

Спецификации Bluetooth 6.0 содержат шесть новых функциональных разделов.
Многое из этого может показаться технически сложным, поэтому мы попытались изложить этот материал в максимально упрощенной форме. Если вам интересны ключевые механизмы этих технологий, можно почитать оригинальные материалы со всеми подробностями на официальном сайте Bluetooth SIG.

Технология канального зондирования (Bluetooth Channel Sounding) позволяет двум или более устройствам Bluetooth определять свое местоположение относительно друг друга с намного большей точностью. Проще говоря, это значит, что два устройства, поддерживающие эту новую технологию, могут найти друг друга на большей площади, чем раньше, причем с точностью до сантиметра.
Принцип работы этой технологии просто замечательный. Он базируется на двух методах определения дальности: с помощью измерения разности фаз (Phase-Based Ranging, PBR) и измерения времени круговой задержки (Round Trip Timing, RTT). Они могут использоваться по отдельности или совместно и обеспечивать исключительно высокую точность измерений.
В методе PBR используются соотношения между фазой, частотой и длиной волны радиосигнала, с помощью которых вычисляется расстояние между устройствами.
1. Инициирующее устройство передает сигнал на отражающее устройство.
2. Отражающее устройство ретранслирует сигнал обратно на инициирующее передающее устройство.
3. Инициирующее устройство измеряет фазу полученного сигнала.
4. Весь процесс повторяется с новым, отличным по частоте сигналом, в результате измеряется еще одна фаза.
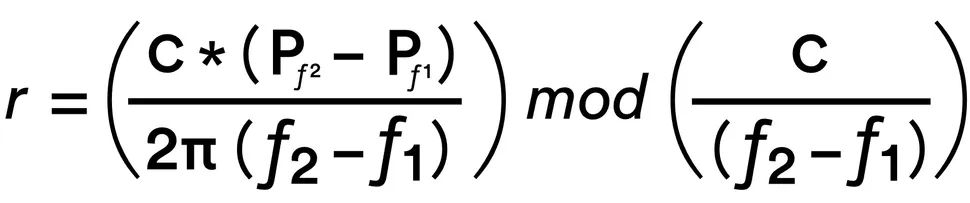
Расстояние рассчитывается по приведенной ниже формуле, куда входит разность частот (f) и разность фаз (P) первого и второго сигналов и скорость электромагнитной волны или скорость света (c). Здесь также используется операция модульного деления mod, так как в силу периодичности фазы (P + 2*pi*n) выражение во второй скобке может прибавляться к результату n раз, n – любое целое число. Метод обеспечивает исключительную точность на расстояниях до 150 метров в диапазоне 1 МГц.
В методе RTT измеряется время, за которое сигнал проходит путь от передающего устройства до принимающего и обратно. По сравнению с PBR это более просто и работает на больших расстояниях.
1. Инициирующее устройство передает пакет данных и записывает время отправки (Time of Departure, ToD).
2. Принимающее устройство принимает пакет и ретранслирует его обратно с заранее известной задержкой.
3. Инициирующее передающее устройство получает пакет и записывает время его прихода обратно (Time of Arrival, ToA).
4. Искомое удвоенное расстояние X (туда и обратно) рассчитывается с использованием разности времени прихода ToA и времени отправки ToD с учетом задержки; результирующее время N умножается на скорость света (299792458 м/с):
N * 299792458 м/с = X
Здесь также учитывается время, затрачиваемое на излучение, прием и запись времени отправки/ прихода сигнала; все эти составляющие определяются аппаратной частью устройств. Таким образом, измерение расстояния осуществляется с высокой точностью. Это очень похоже на то, как работает датчик ToF при определении расстояния до фотографируемого объекта (на котором фокусируется камера).
Метод RTT теоретически обеспечивает 100%-ную точность измерения расстояний, но на практике расстояние всегда будет измеряться с некоторой (очень малой) погрешностью, обусловленной несовершенством «железа».
Это очень общее и упрощенное описание данной технологии. Более подробное описание можно почитать в техническом обзоре Bluetooth Channel Sounding на сайте Bluetooth SIG.

Технология Bluetooth Channel Sounding также включает в себя несколько мощных функций защиты данных, которые направлены на предотвращение удаленного спуфинга и атак типа man-in-the-middle («человек посередине» – тайно подключившийся к коммуникации злоумышленник). Для защиты используются такие методы, как рандомизация сигнала, сильные алгоритмы шифрования, а также возможность перепроверки пути сигнала и местоположения устройств посредством независимого применения PBR и RTT.
Всё это делает Bluetooth 6 намного лучшим решением для таких сервисов, как Find My Device, а также цифровых ключей, умных блокировок и даже мышек Bluetooth.
Новые спецификации Bluetooth были выпущены в августе 2024 года, и все производители устройств получили доступ ко всему диапазону функций. Процессор Snapdragon 8 Elite уже поддерживает новый стандарт, так что смартфоны с Bluetooth 6 тоже, вероятно, не за горами.



